|
|
|
|
Reverse engineering sprint performance, starting with elite outputs and working backward, is useful only when it respects causality, constraints, and adaptation timelines. Used incorrectly, it creates false targets and wasted training cycles.
|
What “reverse engineering speed” actually means
Most coaches and athletes do not reverse-engineer speed. They copy surfaces.
|
They see elite sprinters with:
|
- Extreme vertical stiffness
- Short ground contact times
- Violent limb velocities
- Minimal visible effort
|
|
Then they try to train those expressions directly.
That is imitation, NOT reverse engineering.
|
|
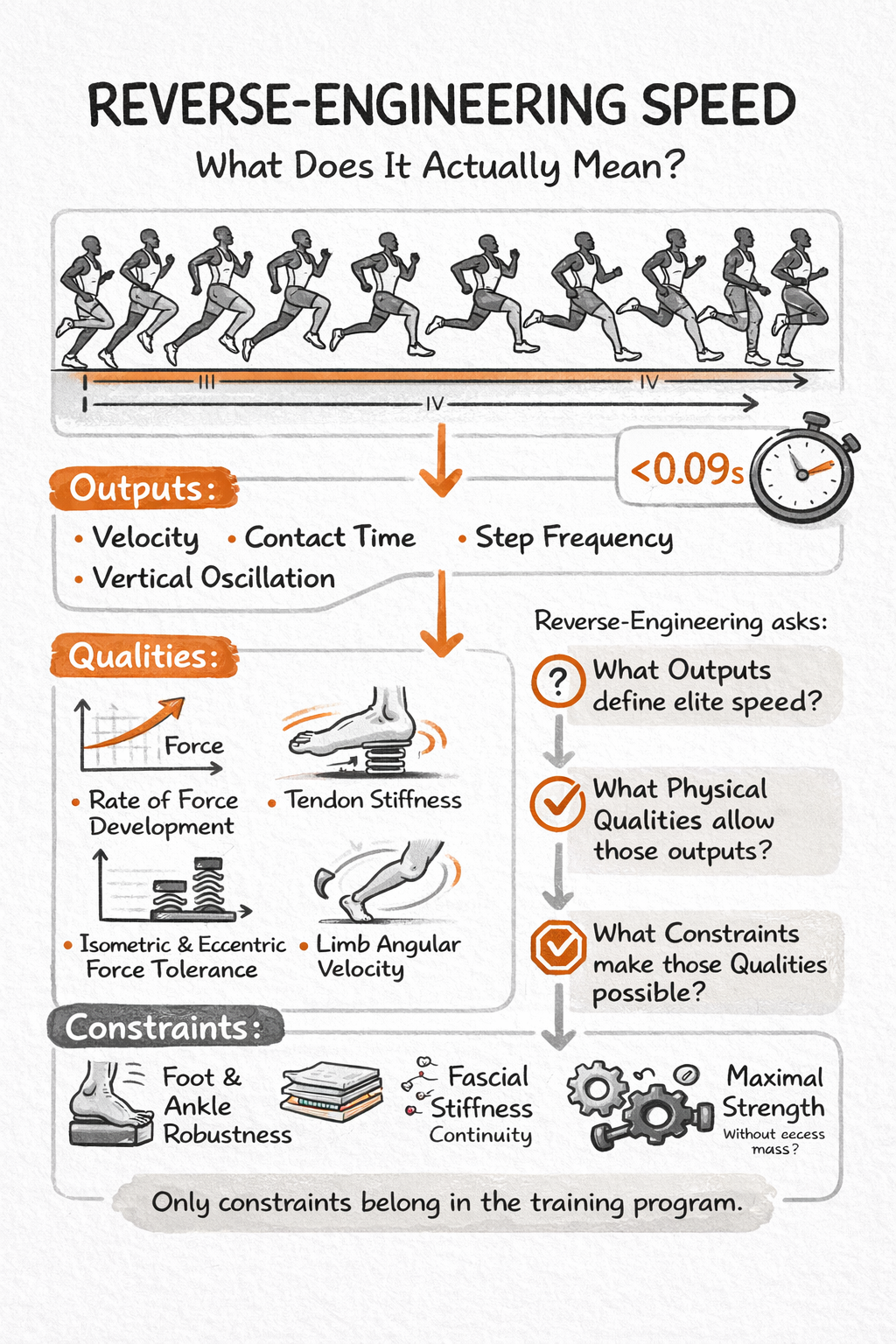
True reverse engineering asks:
|
- What outputs define elite speed?
- What physical qualities allow those outputs?
- What structures and constraints make those qualities possible?
- What training exposures reliably produce those constraints over time?
|
|
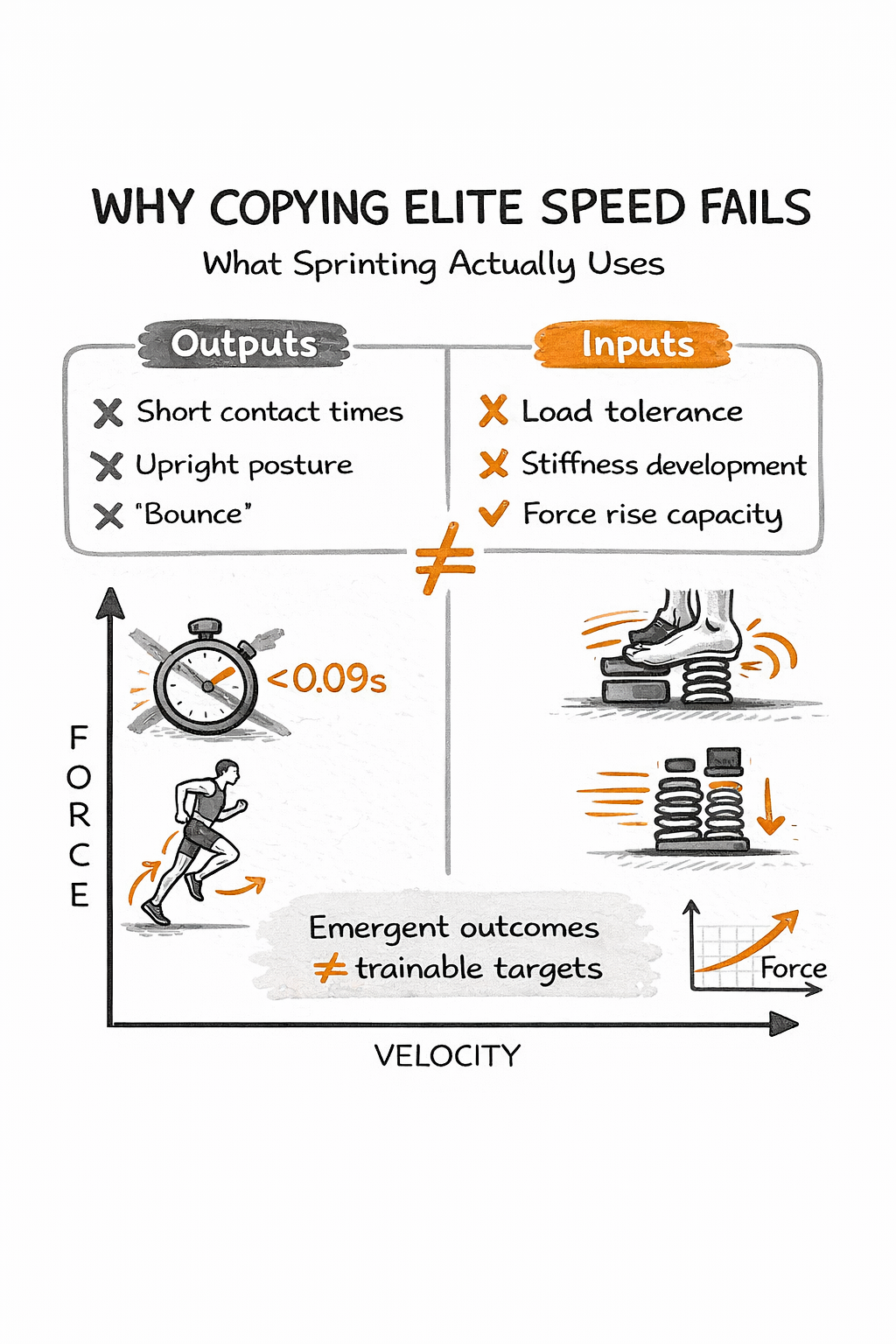
The attributes people try to copy first (and why it fails)
- Ground contact times under ~0.09 s
- “Bounce” or elastic rebound
- Upright max-velocity posture
- Minimal backside mechanics
|
These are emergent properties, not trainable skills.
|
You cannot cue your way into:
|
- Higher tendon stiffness
- Faster force rise
- Greater limb angular velocity
Those come from tissue adaptation, not intent.
|
|
|
|
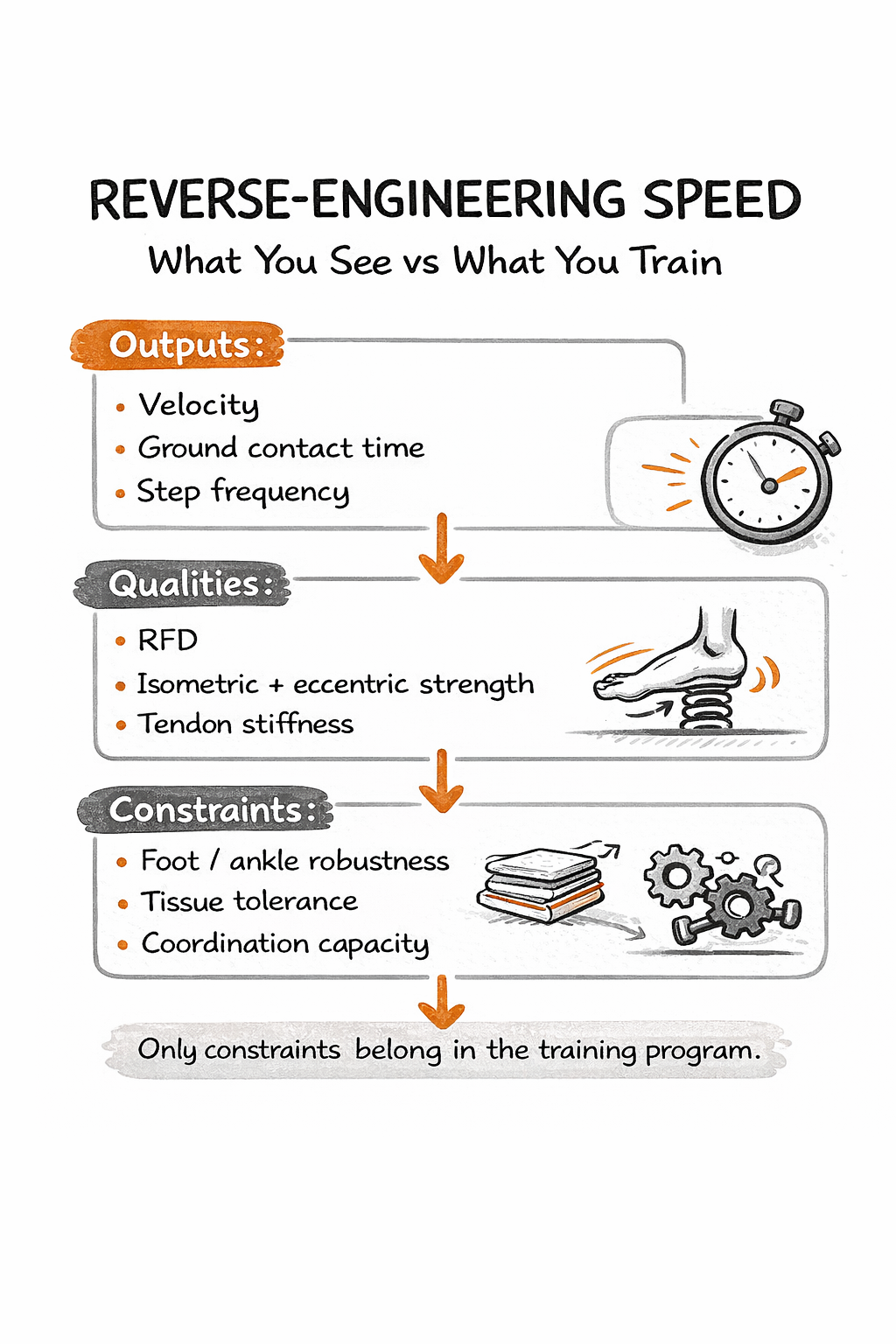
What actually drives elite sprint outputs
Reverse engineering works when you move one layer deeper.
|
Layer 1: Outputs (what you see)
- Velocity
- Contact time
- Step frequency
- Vertical oscillation
Layer 2: Qualities (what allows it)
- Rate of force development
- Isometric and eccentric force tolerance
- Tendon stiffness and recoil efficiency
- Limb angular velocity capacity
Layer 3: Constraints (what must already exist)
- Foot and ankle robustness
- Fascial stiffness continuity
- Segment timing coordination
- Sufficient maximal strength without excess mass
Only layers 2 and 3 are trainable.
|
|
|
Where reverse engineering does work
Reverse engineering is powerful when used to:
|
- Set ceilings, not drills
- Sequence development, not shortcut it
- Filter training, not add more
Practical examples
- If elite max-velocity requires extreme stiffness, early training must build tolerance and stiffness.
- If elastic rebound dominates, prioritize isometrics and eccentrics before high-frequency sprinting.
Reverse engineering defines where you are going, not what you do tomorrow.
|
|
|
|
|
|
|
|
Programming implications
- Isometric and yielding strength at sprint-specific joint angles
- Progressive stiffness exposure
- Submaximal sprinting with high technical consistency
- Long timelines for elastic qualities
- Copying elite drills without prerequisites
- Forcing max-velocity mechanics early
- Chasing visual speed markers
- Programming by highlight reel
Key takeaway
|
Reverse engineering speed is useful only as a diagnostic lens, not a training blueprint.
|
|
Elite sprint attributes are outcomes of years of constraint-specific loading, not templates to imitate.
|
Train what creates speed, not what speed looks like.
|
|
|
|
|
|
|
|
|
|
Thanks for reading. See you soon!
|
|
|
|
|
Sprint Progress Tracker: Measure and Improve Your Speed
|
|
|
|
Use a sprint progress tracker to record times, monitor fatigue, identify trends, and make smarter training decisions that improve sprint performance.
|
|
|
|
|
|
|
|
Why absorbing force efficiently is the missing link to faster sprint times, shorter ground contacts, and better performance.
|
|
|
|
Most athletes focus on producing force. Elite sprinters also master absorbing it. Every sprint step begins with a collision between the foot and the ground. Before you can produce force, your body must accept it. Athletes who develop exceptional eccentric strength can absorb larger forces, store more elastic energy, reduce ground contact time, and return more of that energy into …
|
|
|
|
|
|
|
|
|